理学院数学系胡洪晓副教授与英国曼彻斯特大学丁正桃教授合作在非线性时滞系统的最优反馈控制方面取得进展。相关成果以“Optimal Feedback Control for a Class of Nonlinear Time-Delay Systems”为题,发表于控制领域期刊《IEEE Transactions on Automatic Control》[IEEE Trans. Autom. Control, 70, 5568-5575, 2025]。该研究针对具有时滞的非线性系统,提出了一套面向无限时域、适用于非线性—非二次型性能指标的最优控制设计框架,为复杂动态系统的稳定与优化控制提供了新的理论工具。上海理工大学理学院是论文第一完成单位。论文第一作者胡洪晓副教授,通讯作者丁正桃教授(曼彻斯特大学),合作作者还有周梓昕博士(南京航空航天大学)和徐利光副教授(上海理工大学光电学院)。
时滞广泛存在于工程系统中,如网络控制系统、电力系统、生物化学过程等,其非线性与滞后特性使得传统控制方法难以适用。本研究围绕这一难题展开:团队提出了一种新的分析与设计策略,实现了对非线性时滞系统最优反馈控制器的构造。研究首先基于Lyapunov泛函方法,建立了非线性时滞系统的稳定性判据。作者进一步证明,该Lyapunov泛函正是相应泛函哈密顿—雅可比—贝尔曼(HJB)方程的解。基于此,论文给出了最优性充分条件,并提出了稳态形式的泛函HJB方程,确保所设计的控制器同时满足稳定性和最优性要求。该成果为解决复杂非线性时滞系统的最优控制问题提供了新的思路,对智能制造、自动驾驶、电力系统运行优化等工程领域具有潜在应用价值。
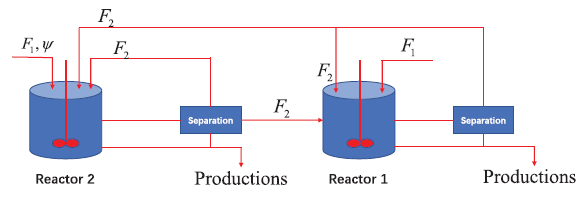
理论在带回流的化学级联反应器方面的应用
论文链接:https://doi.org/10.1109/TAC.2025.3552022

