近日,理学院李忘言副教授联合上海交通大学附属瑞金医院研究团队以“MSLP-MDEL: Multi-scale Laplacian pyramid-based self-supervised monocular depth estimation for laparoscopic surgery”为题,在《Biomedical Signal Processing and Control》(影响因子:4.9,中科院SCI分区:2区)发表研究成果。论文第一作者为理学院研究生向宇,通讯作者包括:李忘言副教授(上海理工大学)、常庆研究员(瑞金医院)、刘坤副主任医师(瑞金医院)。
腹腔镜手术凭借创伤小、术后恢复快等优势,已成为微创手术的核心术式,但术中二维成像缺乏真实深度感知的问题,始终制约着手术的精准度与安全性,器械误操作、组织损伤等风险仍难以完全规避。随着医疗人工智能与智能手术系统的发展,腹腔镜手术中产生的海量视觉数据为解决这一难题提供了新路径,然而生物组织弹性形变、手术视野遮挡、光照反射等复杂场景,以及医疗数据标注成本高、隐私保护要求严苛等问题,让传统深度估计方法频频失灵,难以捕捉手术场景的真实动态特征。
本研究针对腹腔镜手术的视觉痛点,提出了 “多尺度特征融合+ 深度残差优化+ 自监督学习” 的技术体系。所提网络架构通过多尺度拉普拉斯金字塔结构对腹腔镜图像特征进行分层分解与重构,同时融入深度残差模块,精准还原软组织边界与细微解剖结构,解决了传统方法深度图模糊、边界失真的问题。此外,引入了轻量级坐标注意力机制,动态强化对形变、遮挡组织区域的特征感知,提升模型对复杂手术场景的适应性,并采用基于亮度一致性的自监督学习策略,利用腹腔镜视频序列的几何与光度一致性作为监督信号,摆脱了对人工标注深度数据的依赖。所提网络架构仅需输入单张腹腔镜图像,就能快速完成深度图的实时重建,满足手术的实时性要求。
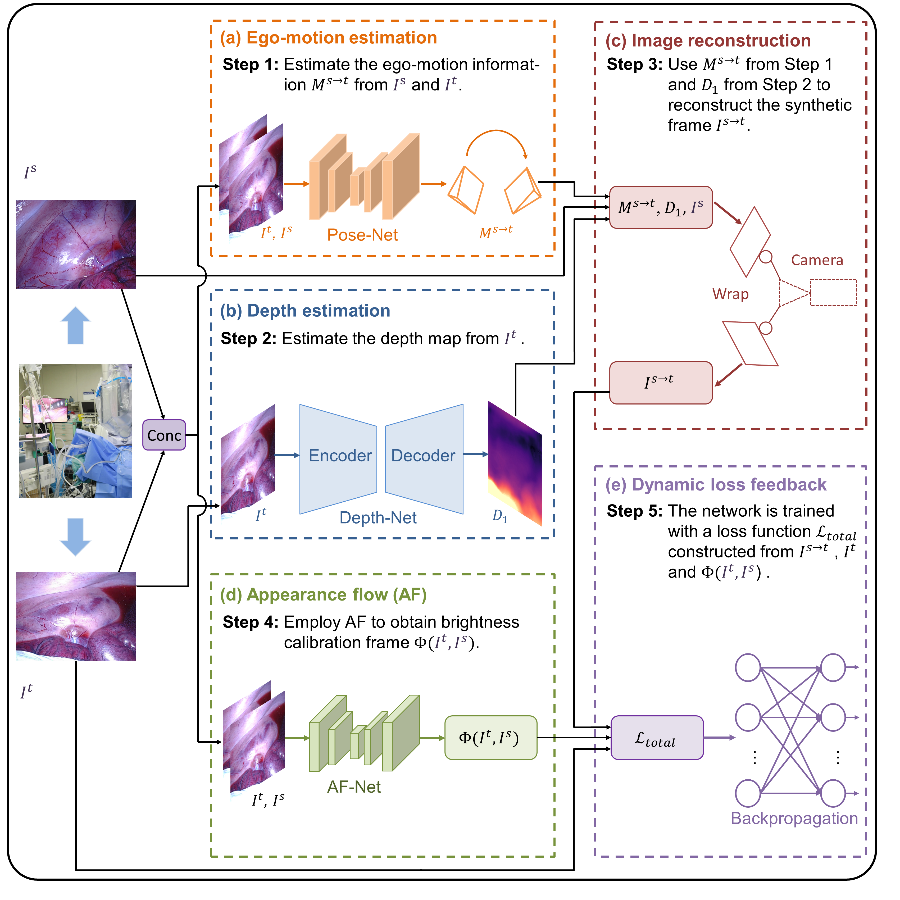
框架设计示意图
随着机器人腹腔镜手术、智能手术导航系统的快速发展,精准的实时深度感知成为智能微创外科的核心技术需求。本研究提出的基于多尺度拉普拉斯金字塔的自监督单目深度估计方法,为医疗大数据的高效利用提供了新思路,其无需密集标注的特性,也为解决医疗数据标注难、隐私保护难等行业痛点提供了技术参考。该方法可进一步与手术机器人、增强现实导航系统融合,推动腹腔镜手术向更智能、更精准的方向发展,为患者带来更安全、微创的外科治疗体验,同时也为智能医疗影像分析、手术人工智能的研发提供了新的技术范式。
论文链接:
https://doi.org/10.1016/j.bspc.2026.109890

